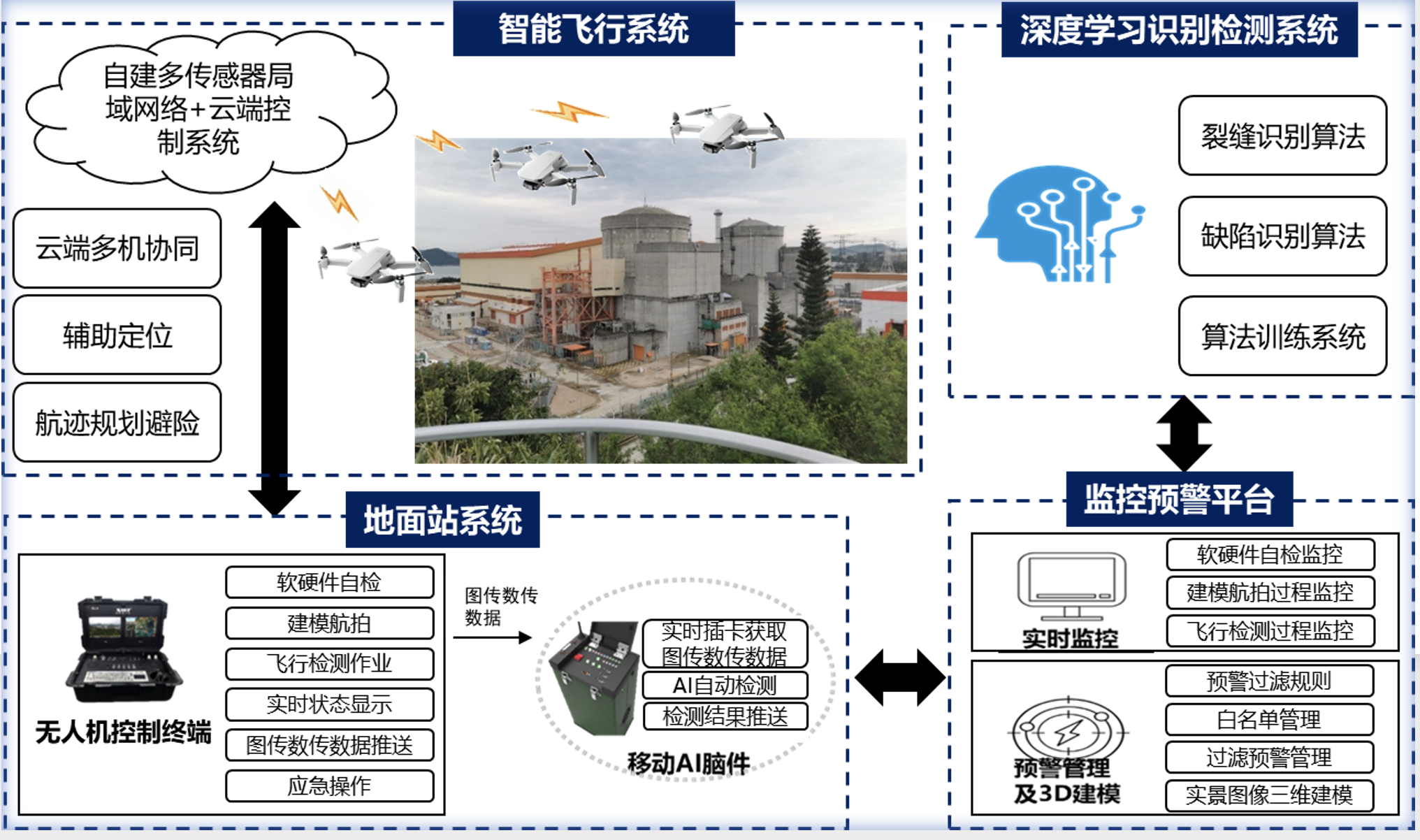
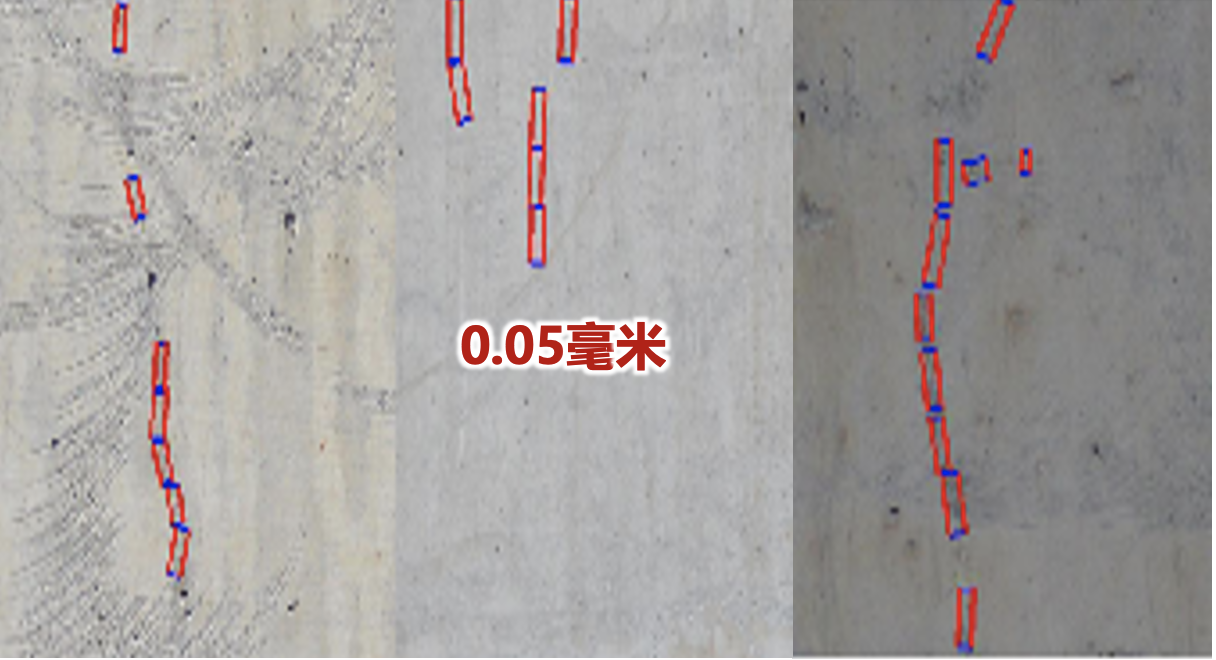
工业大数据智能分析项目,研发了世界上首套核电站反应堆安全壳表面缺陷检测智能机器人,有效地保障了我国重要设施安全。裂缝宽度识别误差0.05mm,缺陷定位误差小于10cm,缺陷检出率大于90%。
主要技术包括:
1、点线特征融合的SLAM算法,对连续帧提取角点,使用KLT光流法对角点进行追踪,使用LSD线段检测器提取线特征。
2、基于旋转框裂缝检测视角的多分支检测模型,基于几何距离感知的损失函数用于提取差异性的深度特征。
本技术整体达到国际先进水平、微小裂缝及缺陷目标识别算法达到国际领先水平。
本技术已在中广核落地应用,研制了中广核电站首个安全壳检测智能机器人,能实现GPS缺失下多传感器融合精准定位、基于几何距离多样性的小目标裂缝检测。57.2m安全壳定位精度达10cm (发表在TNSE),0.05毫米裂缝检测率达95% (发表在CVPR),检测时间由1个月降低到8个小时。